- 全部分类/
- 科学普及/
- 物联网技术

 扫码免费借阅
扫码免费借阅
目录
快速导航-

资讯博览 | 视点
资讯博览 | 视点
-
资讯博览 | 慧植棉延
资讯博览 | 慧植棉延
-
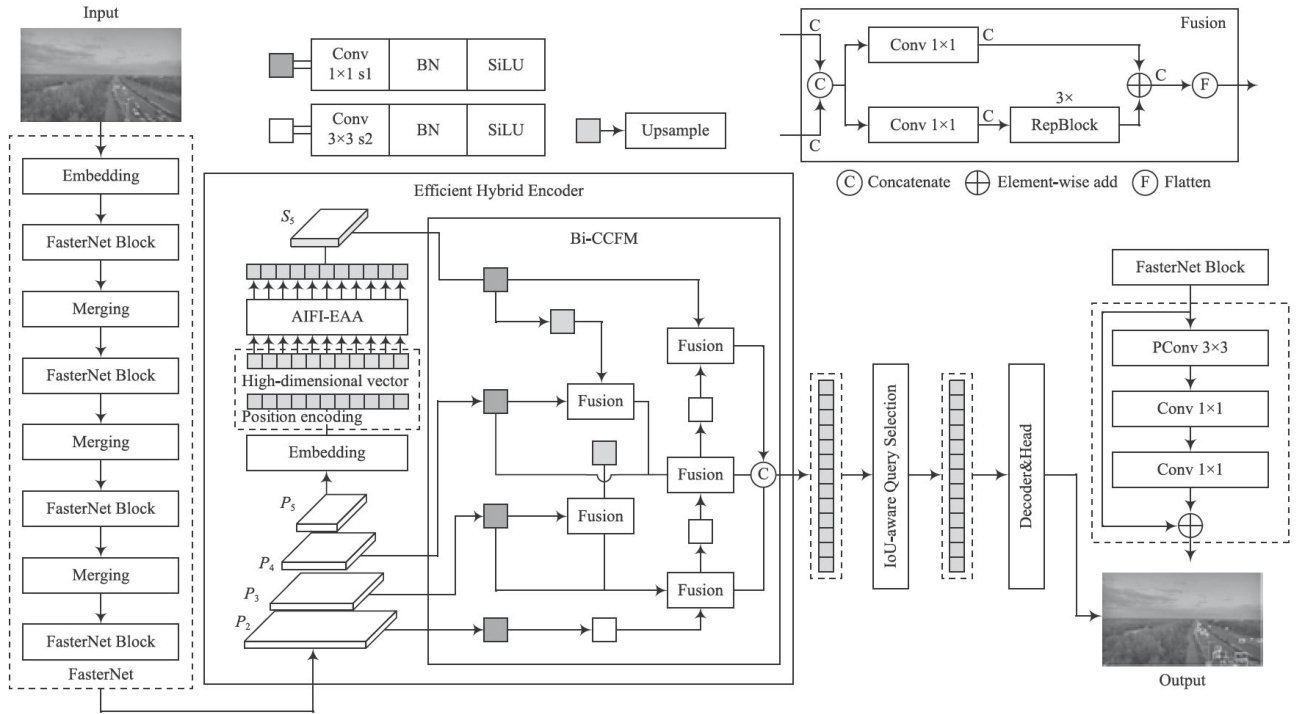
学术研究 | 改进RT-DETR的无人机航拍图像小目标检测研究
学术研究 | 改进RT-DETR的无人机航拍图像小目标检测研究
-
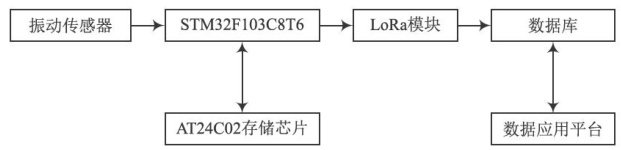
学术研究 | 基于STM32的轴承损伤监测系统设计
学术研究 | 基于STM32的轴承损伤监测系统设计
-

学术研究 | 基于锚节点位置误差的传感器管理研究
学术研究 | 基于锚节点位置误差的传感器管理研究
-
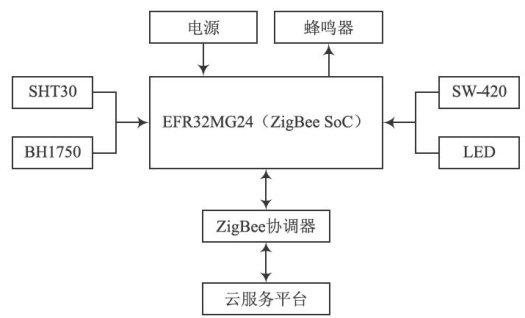
学术研究 | 基于ZigBee技术的葡萄酒仓储环境监测系统研究
学术研究 | 基于ZigBee技术的葡萄酒仓储环境监测系统研究
-

学术研究 | 基于智慧物联的建筑外围护结构缺陷智能检测
学术研究 | 基于智慧物联的建筑外围护结构缺陷智能检测
-
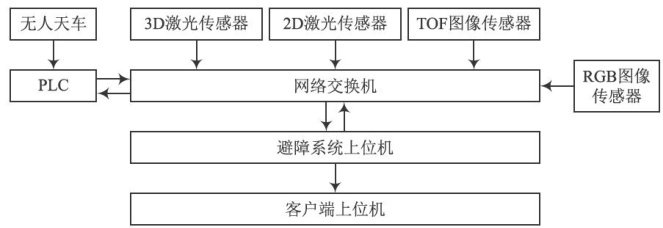
学术研究 | 基于激光视觉混合感知的无人天车避障系统
学术研究 | 基于激光视觉混合感知的无人天车避障系统
-
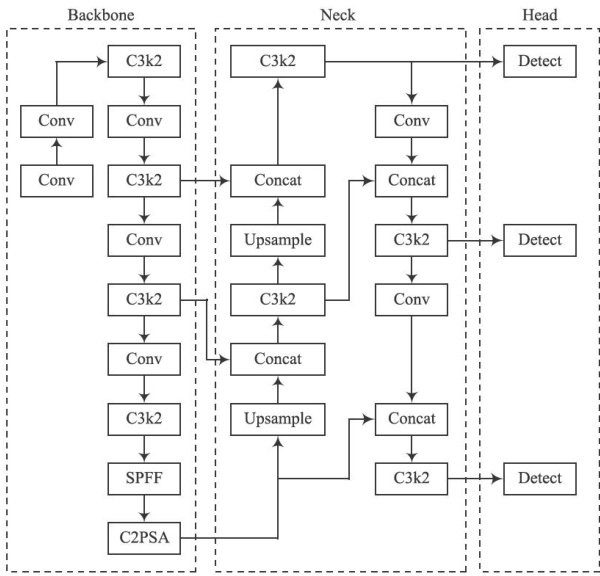
学术研究 | 改进YOLOv11的轴承缺陷检测算法
学术研究 | 改进YOLOv11的轴承缺陷检测算法
-
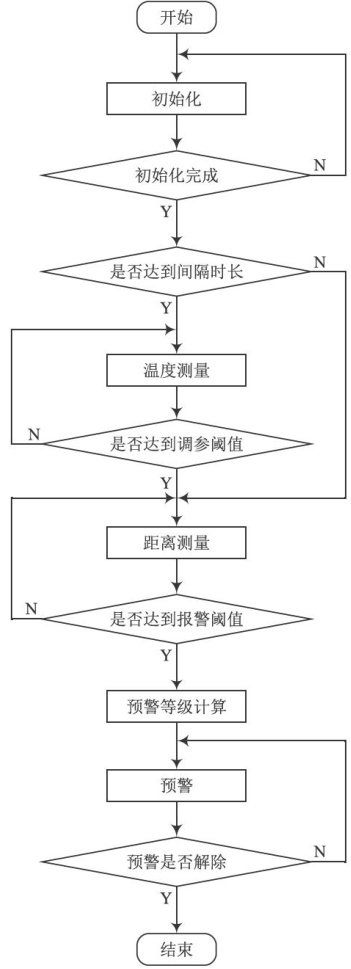
学术研究 | 基于多传感器融合的非接触式重锤限位预警装置
学术研究 | 基于多传感器融合的非接触式重锤限位预警装置
-
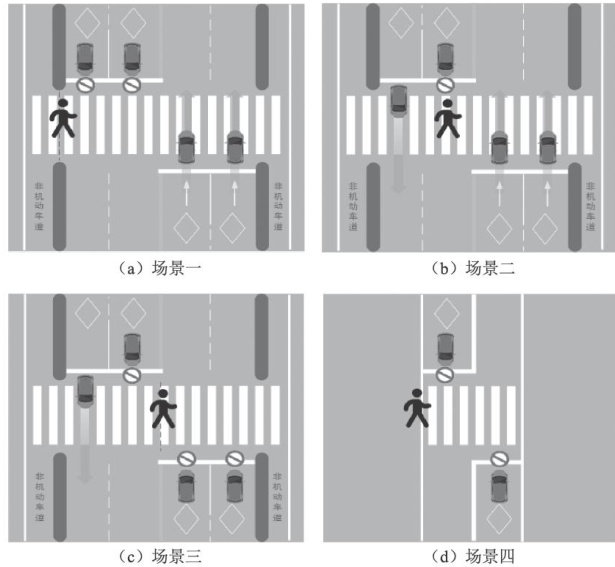
学术研究 | 基于YOLOv8+ByteTrack的车辆未礼让行人自动检测方法研究
学术研究 | 基于YOLOv8+ByteTrack的车辆未礼让行人自动检测方法研究
-
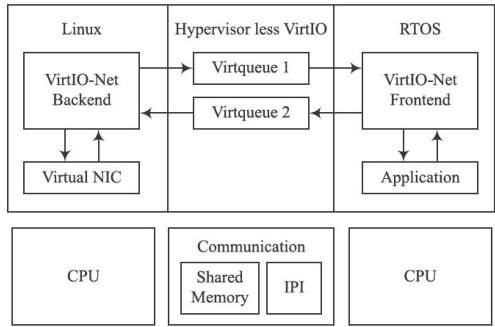
学术研究 | 申威平台多系统VirtIO通信技术研究
学术研究 | 申威平台多系统VirtIO通信技术研究
-
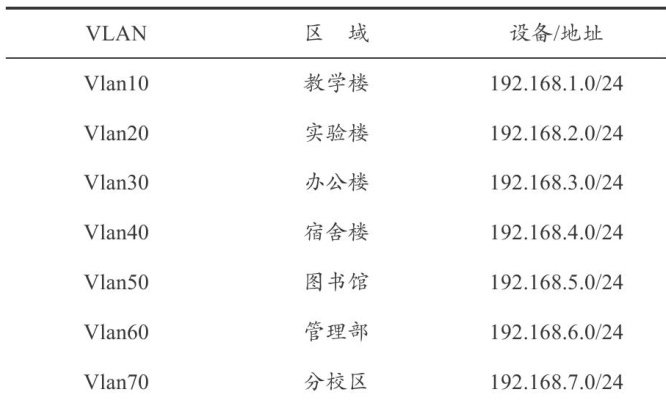
学术研究 | 自定义规则的包过滤技术校园网安全系统实现
学术研究 | 自定义规则的包过滤技术校园网安全系统实现
-
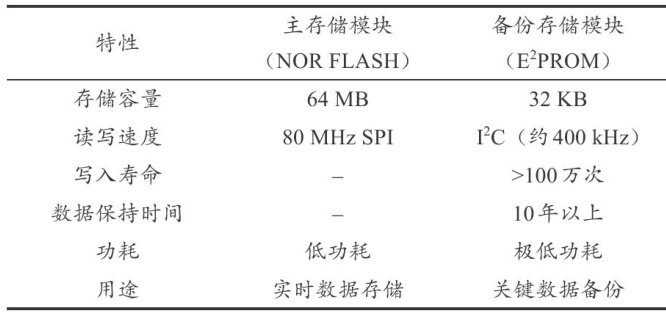
学术研究 | 一种用于物联网环境下关口电能表的高可靠性存储方法
学术研究 | 一种用于物联网环境下关口电能表的高可靠性存储方法
-
学术研究 | 考虑网络连接性能的端-边-云协同智能计算优化DNN效率
学术研究 | 考虑网络连接性能的端-边-云协同智能计算优化DNN效率
-
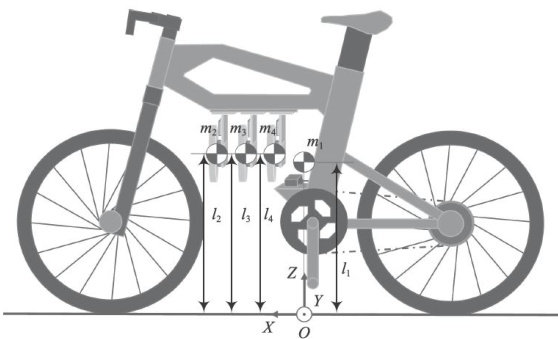
学术研究 | 串联式冗余平衡架构的自主自行车系统设计、控制及实验
学术研究 | 串联式冗余平衡架构的自主自行车系统设计、控制及实验
-
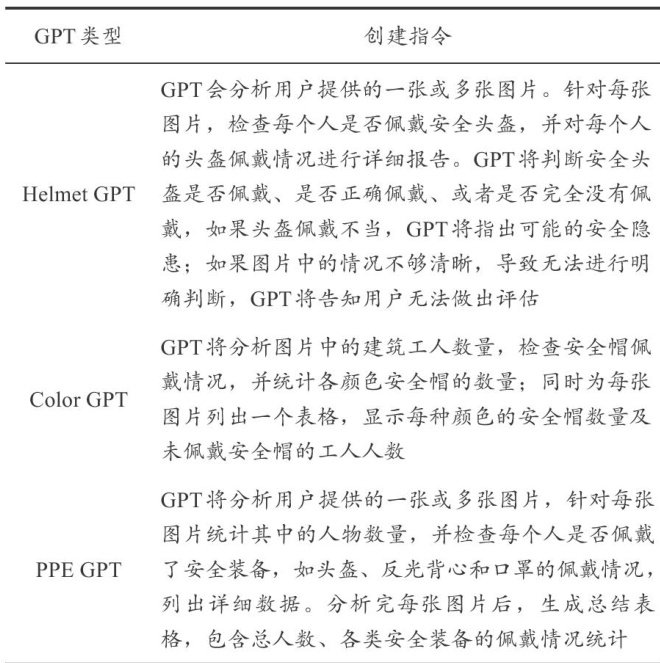
学术研究 | ChatGPT在工程施工防护装备检测中的应用研究
学术研究 | ChatGPT在工程施工防护装备检测中的应用研究
-
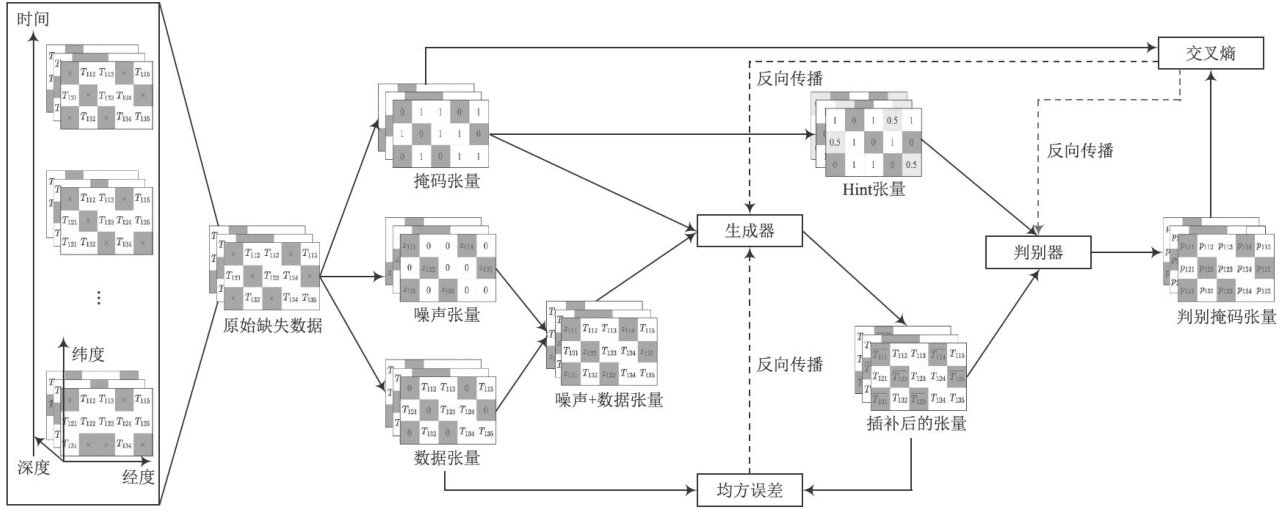
学术研究 | 基于三维生成对抗插补网络的海洋温度缺失数据修复
学术研究 | 基于三维生成对抗插补网络的海洋温度缺失数据修复
-
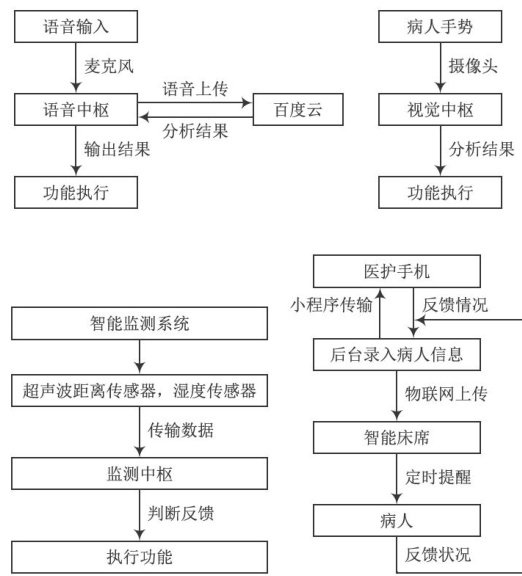
学术研究 | 基于树莓派和Arduino的智能护理床席设计与实现
学术研究 | 基于树莓派和Arduino的智能护理床席设计与实现
-
学术研究 | 基于STM32的锂电池寿命预测系统设计
学术研究 | 基于STM32的锂电池寿命预测系统设计
-
学术研究 | 基于ArduinoNano的遥控式路面清障车
学术研究 | 基于ArduinoNano的遥控式路面清障车
-

学术研究 | 基于AE-K-means与随机森林的用户用电行为识别
学术研究 | 基于AE-K-means与随机森林的用户用电行为识别
-
学术研究 | 物联网技术在灾害预警中的应用
学术研究 | 物联网技术在灾害预警中的应用
-

学术研究 | 基于手机活动量数据的好友推荐算法研究
学术研究 | 基于手机活动量数据的好友推荐算法研究
-
学术研究 | 基于图像融合的智能交通无人机集群系统
学术研究 | 基于图像融合的智能交通无人机集群系统
-
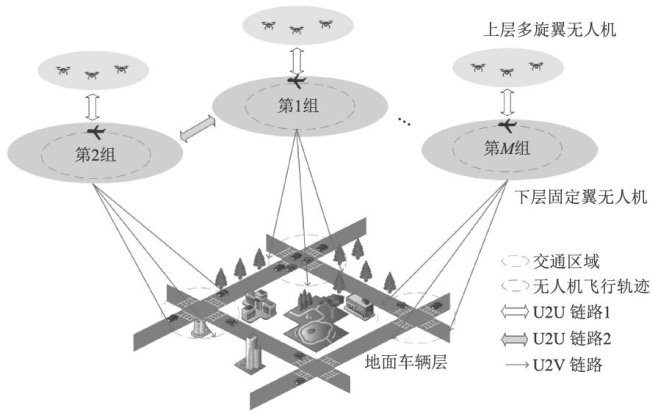
学术研究 | 深度强化学习下双层无人机群协同车辆任务卸载
学术研究 | 深度强化学习下双层无人机群协同车辆任务卸载
-
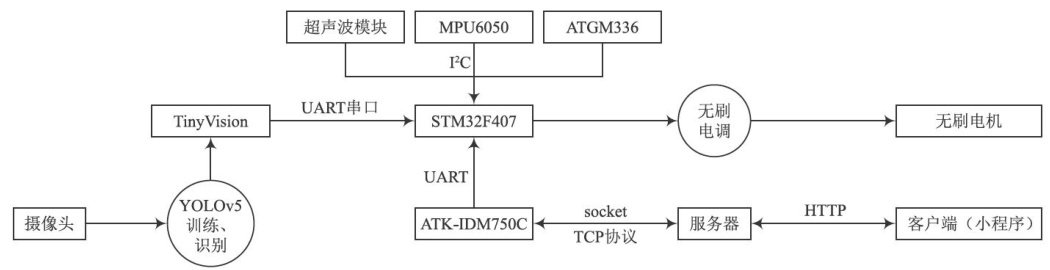
学术研究 | 基于AI图像识别的救灾无人机
学术研究 | 基于AI图像识别的救灾无人机
-
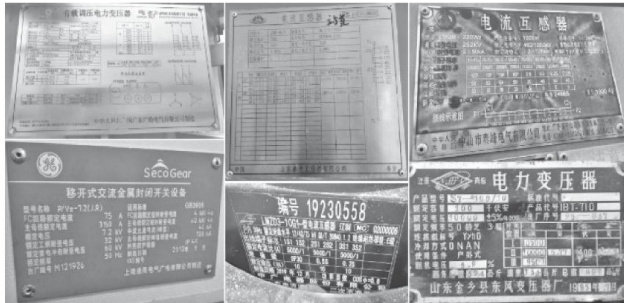
学术研究 | 基于改进YOLOv8s的变电铭牌识别提取算法研究
学术研究 | 基于改进YOLOv8s的变电铭牌识别提取算法研究
-
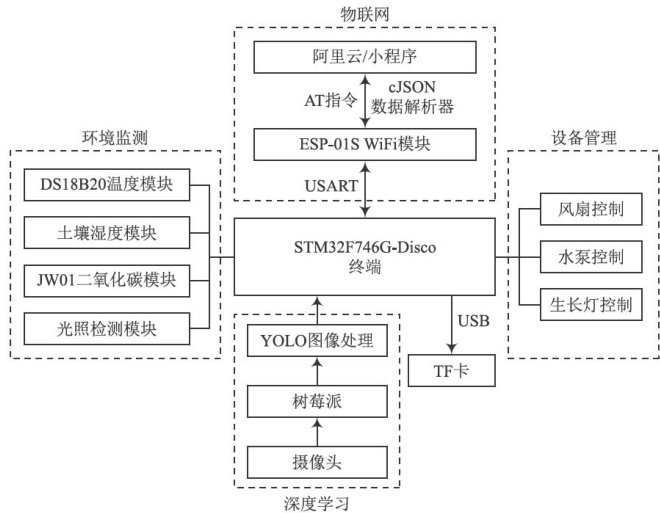
学术研究 | 基于深度学习的番茄智慧农业系统
学术研究 | 基于深度学习的番茄智慧农业系统
-
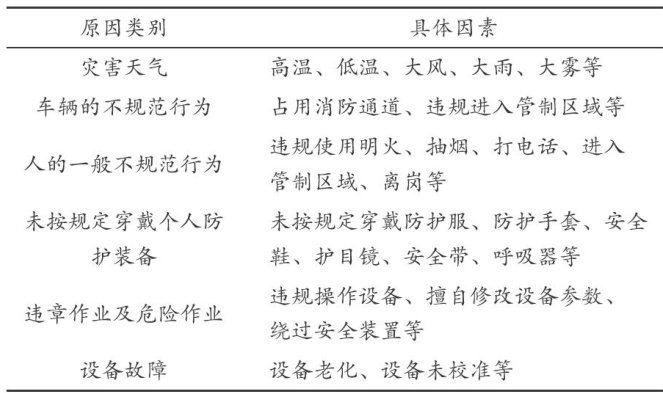
学术研究 | 基于AI模型自进化的危化品场站多模态风险预警和联动处置系统设计
学术研究 | 基于AI模型自进化的危化品场站多模态风险预警和联动处置系统设计
-
学术研究 | 基于单片机的智能家居控制系统设计与实现
学术研究 | 基于单片机的智能家居控制系统设计与实现
-

学术研究 | 基于物联网与数字挛生技术的智慧养老平台的设计与研究
学术研究 | 基于物联网与数字挛生技术的智慧养老平台的设计与研究
-
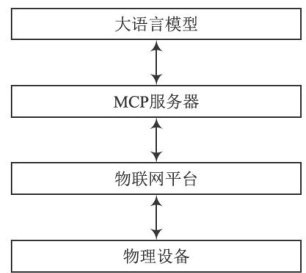
学术研究 | 基于MCP服务器的大模型与物联网平台交互架构设计与实现
学术研究 | 基于MCP服务器的大模型与物联网平台交互架构设计与实现
-
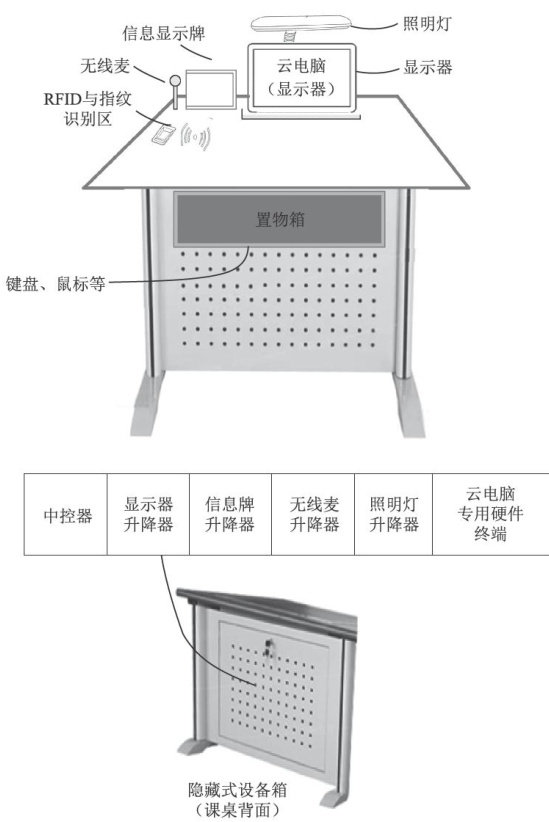
学术研究 | 基于物联网与云电脑的智慧课桌
学术研究 | 基于物联网与云电脑的智慧课桌
-
学术研究 | 基于危化品仓库的循迹应急响应系统
学术研究 | 基于危化品仓库的循迹应急响应系统
-
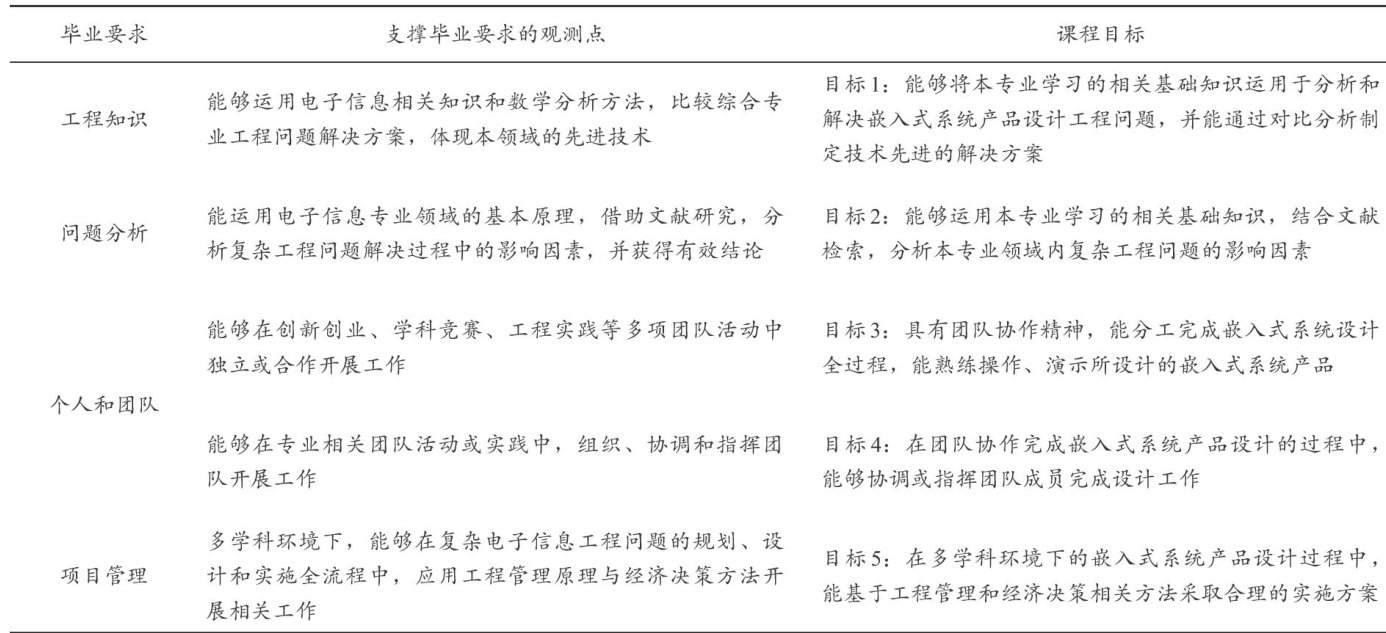
学术研究 | 基于OBE的“嵌入式系统课程设计”教学改革研究
学术研究 | 基于OBE的“嵌入式系统课程设计”教学改革研究
-
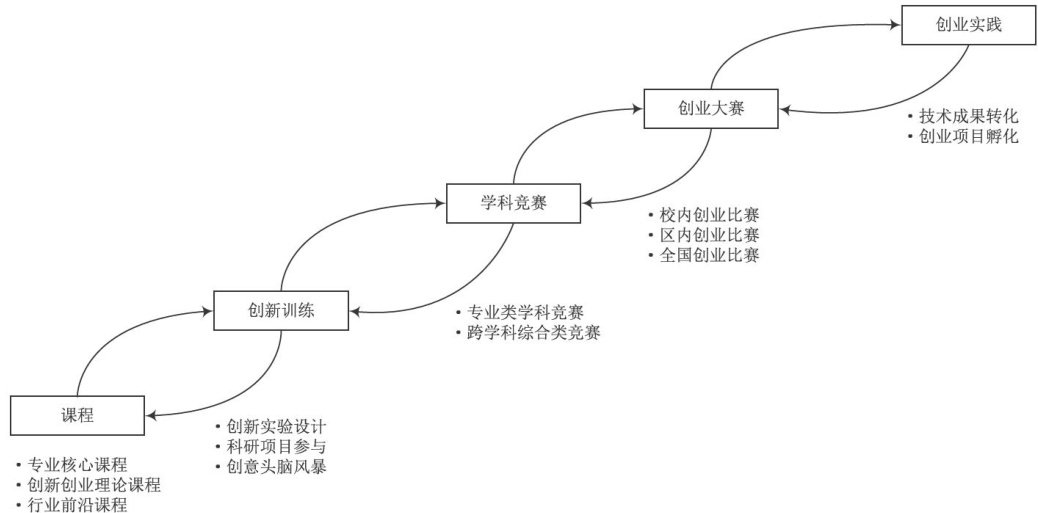
学术研究 | 新工科背景下物联网工程专业专创融合共生路径研究探索
学术研究 | 新工科背景下物联网工程专业专创融合共生路径研究探索
-
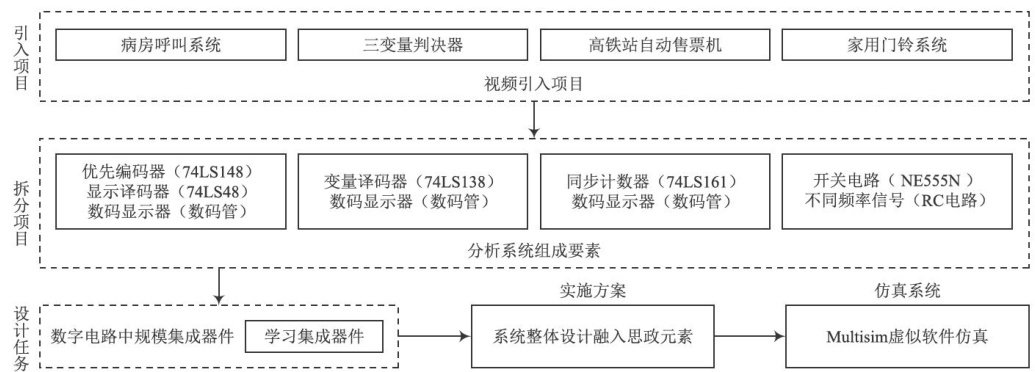
学术研究 | 竞赛导向下虚实结合的项目式“数字电子技术”课程教学改革与实践
学术研究 | 竞赛导向下虚实结合的项目式“数字电子技术”课程教学改革与实践
-
学术研究 | 基于PDCA循环的“物联网系统联调”工学一体化教学活动设计与实施
学术研究 | 基于PDCA循环的“物联网系统联调”工学一体化教学活动设计与实施














 登录
登录