- 全部分类/
- 科学普及/
- 化工自动化及仪表

 扫码免费借阅
扫码免费借阅
目录
快速导航-
过程控制 | 基于模糊聚类证据推理的概率鲁棒性分数阶PID控制
过程控制 | 基于模糊聚类证据推理的概率鲁棒性分数阶PID控制
-
过程控制 | 原石灰配制石灰乳智能控制系统的设计
过程控制 | 原石灰配制石灰乳智能控制系统的设计
-
过程控制 | 基于ECS-700的苯甲酸熔融结晶控制系统设计
过程控制 | 基于ECS-700的苯甲酸熔融结晶控制系统设计
-
检测与仪表 | 水下多普勒测速仪的海底散射回波模型优化
检测与仪表 | 水下多普勒测速仪的海底散射回波模型优化
-
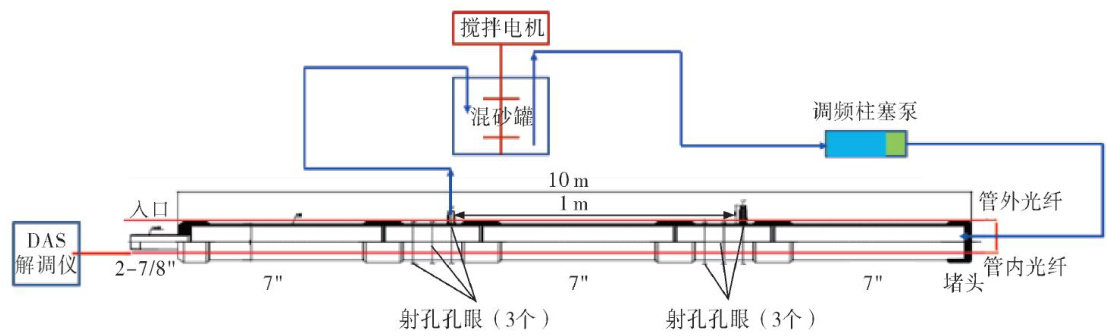
检测与仪表 | 水力压裂裂缝进液声波响应实验与评价方法研究
检测与仪表 | 水力压裂裂缝进液声波响应实验与评价方法研究
-

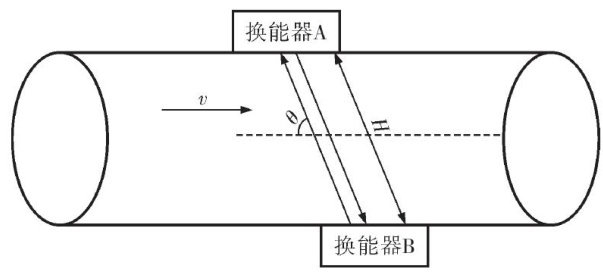
检测与仪表 | 基于SVC模型的超声波流量计液体自适应测量方法
检测与仪表 | 基于SVC模型的超声波流量计液体自适应测量方法
-
检测与仪表 | 复杂管道流量测量系统的优化设计
检测与仪表 | 复杂管道流量测量系统的优化设计
-

研究与应用 | 基于改进D-S证据理论的水下电子模块可靠性评估方法
研究与应用 | 基于改进D-S证据理论的水下电子模块可靠性评估方法
-
研究与应用 | 用于不锈钢表面点蚀缺陷检测的二值化图像融合网络
研究与应用 | 用于不锈钢表面点蚀缺陷检测的二值化图像融合网络
-
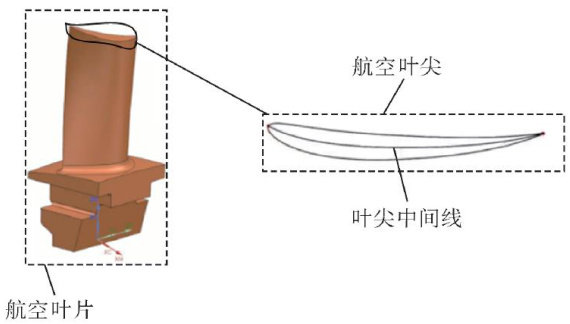
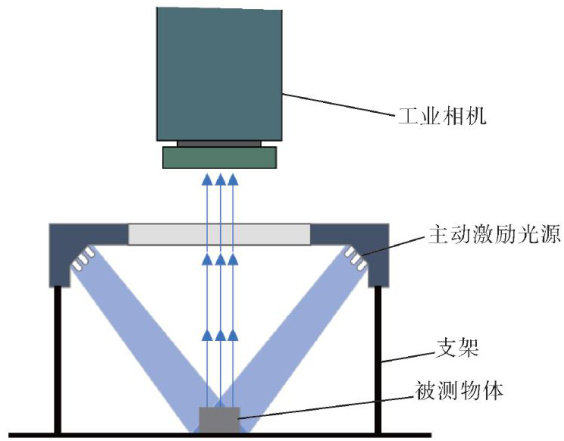
研究与应用 | 基于结构光视觉的航空叶片叶尖中间线提取方法
研究与应用 | 基于结构光视觉的航空叶片叶尖中间线提取方法
-

研究与应用 | 大规模成品油调和优化模型及求解研究
研究与应用 | 大规模成品油调和优化模型及求解研究
-
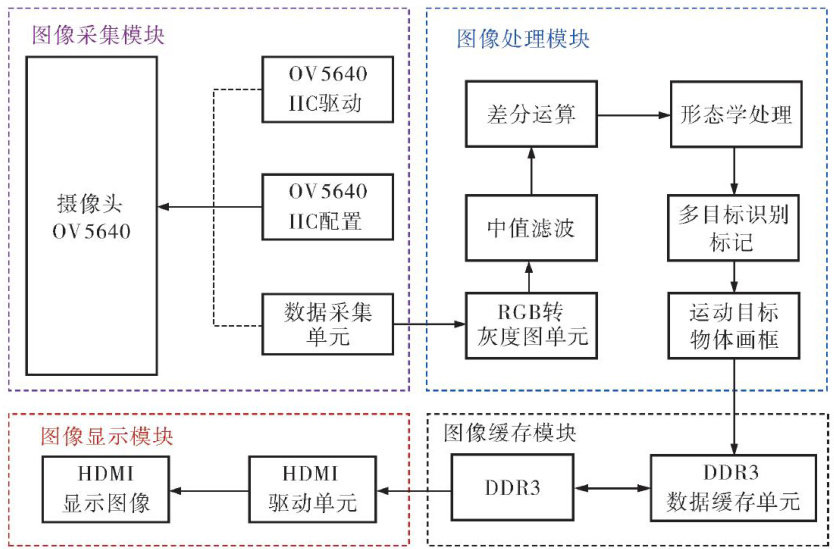
研究与应用 | 基于FPGA的多运动目标检测与追踪系统设计
研究与应用 | 基于FPGA的多运动目标检测与追踪系统设计
-

研究与应用 | 基于机械阀液压补偿的钻井泥浆液位自动调控方法
研究与应用 | 基于机械阀液压补偿的钻井泥浆液位自动调控方法
-
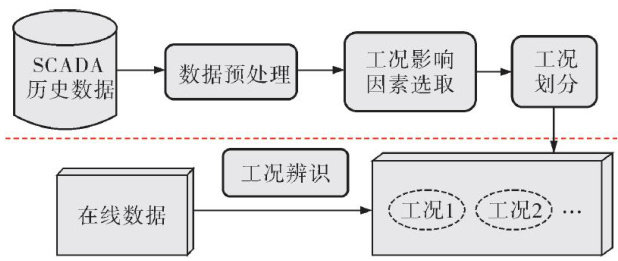
研究与应用 | 基于模式识别的管道SCADA系统智能分析报警算法研究
研究与应用 | 基于模式识别的管道SCADA系统智能分析报警算法研究
-
研究与应用 | 基于CEEMD与能量分析的阀门全生命周期卡涩状态监测与性能预测
研究与应用 | 基于CEEMD与能量分析的阀门全生命周期卡涩状态监测与性能预测
-
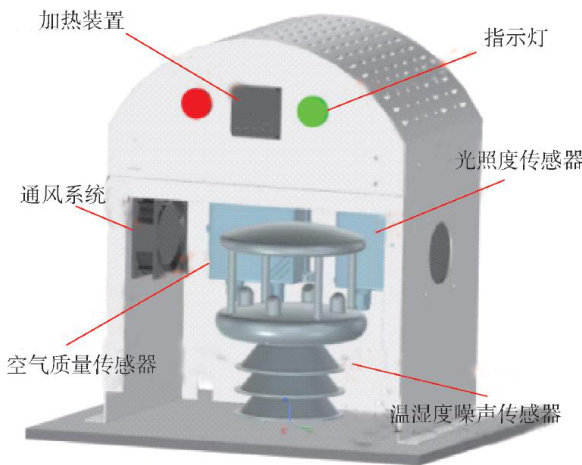
研究与应用 | 基于Node-RED的SMT贴片车间多传感智能环境监控平台
研究与应用 | 基于Node-RED的SMT贴片车间多传感智能环境监控平台
-
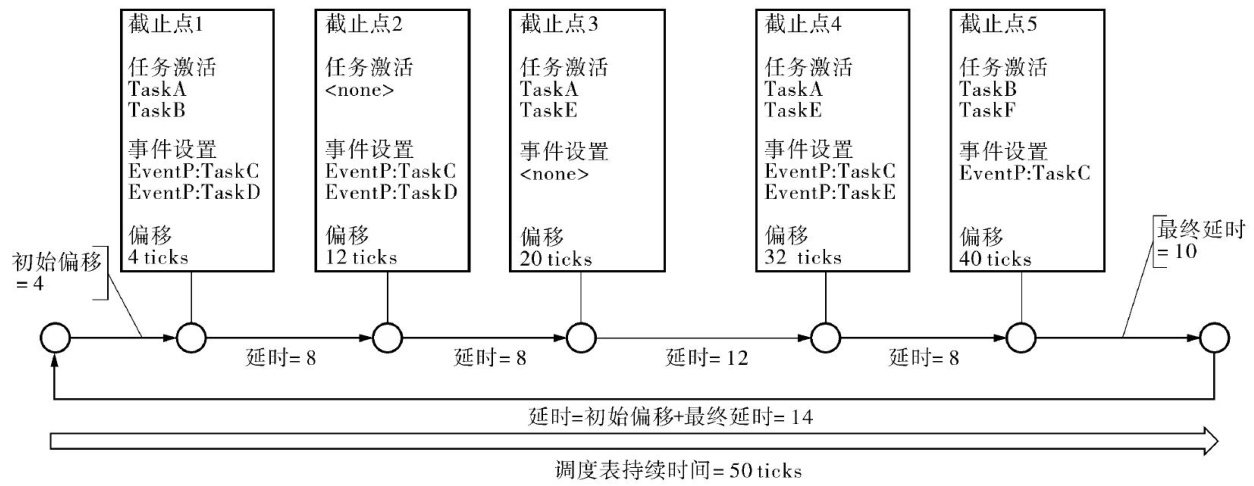
研究与应用 | RTOS分区机制在工业自动化中的应用研究
研究与应用 | RTOS分区机制在工业自动化中的应用研究
-
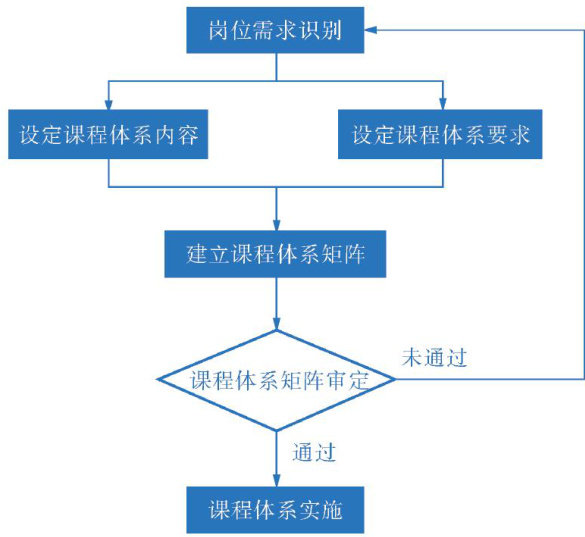
研究与应用 | 基于安全生产数字化技术的化工从业人员安全技能提升系统
研究与应用 | 基于安全生产数字化技术的化工从业人员安全技能提升系统
-
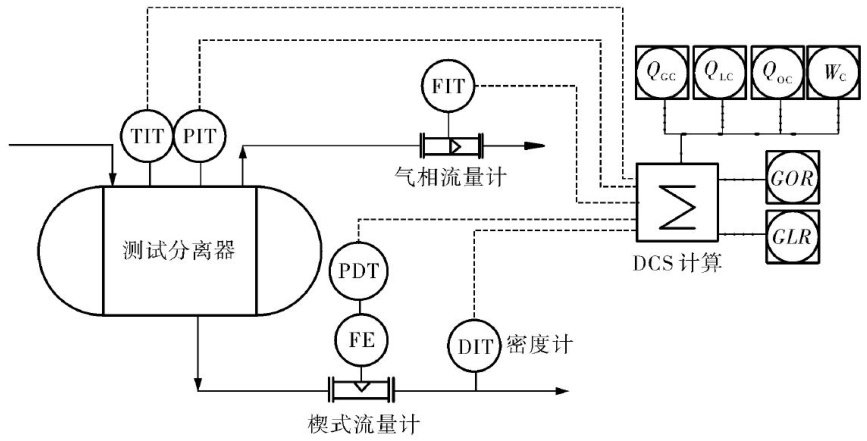
技改与创新 | 复杂工况下一种经济型测井计量方案的实现
技改与创新 | 复杂工况下一种经济型测井计量方案的实现
-

技改与创新 | 基于人因工程的控制室人机接口模式识错系统
技改与创新 | 基于人因工程的控制室人机接口模式识错系统
-
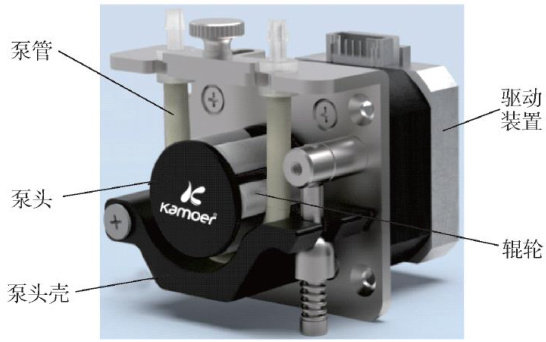
技改与创新 | 蠕动泵流量计算方法及实验验证
技改与创新 | 蠕动泵流量计算方法及实验验证
-
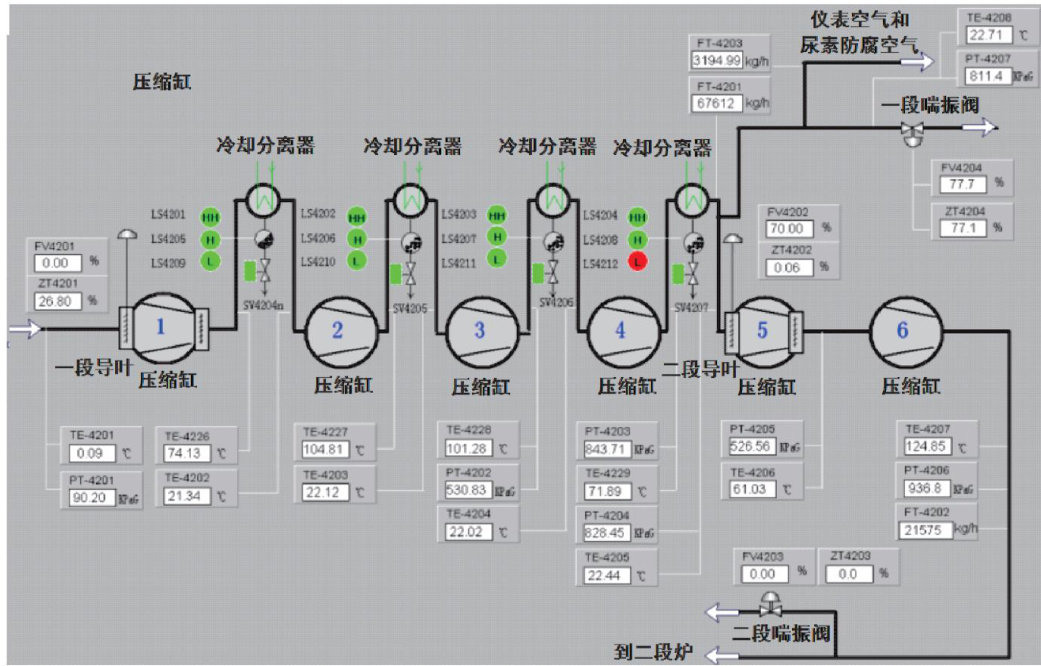
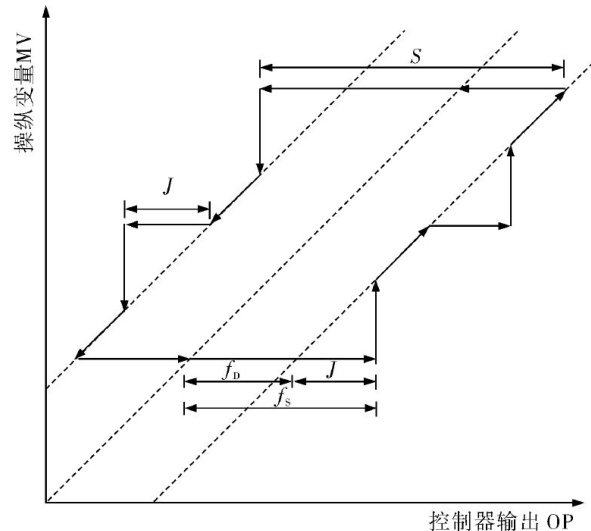
技改与创新 | 激发多轴式压缩机二段防喘振阀全开原因分析及改进措施
技改与创新 | 激发多轴式压缩机二段防喘振阀全开原因分析及改进措施
-
综合信息 | 广告索引
综合信息 | 广告索引









 登录
登录